
Bu laboratuvarda döner kanatlı ve sabit kanatlı İHA’ların tasarımları, birleştirilmesi, kontrolü ve programlanması yapılmaktadır. Bu çalışmalara ek olarak hazır İHA’lar ile kod geliştirilmesi, sürü İHA ve karma sürü çalışmaları, yol planlama çalışmaları, görüntü işleme ve konumlandırma çalışmaları üzerine hem simülasyon hem de gerçek ortam testleri yapılmaktadır.
Laboratuvarımızda İHA’ların kapalı ortamda güvenle uçmalarını sağlamak, kendilerine ve çevrelerine verebilecekleri zararı minimize edebilmek için 3 metreye 5 metre bir kafes kurulmuştur. Laboratuvarımızda 4 Adet mini İHA ve 2 Adet Tello İHA, 3 adet kendi birleştirdiğimiz dron ve çeşitli dron montajı, testi vb. için gerekli ekipmanlar bulunmaktadır.
Mini İHA’lar üzerinde sürü algoritması testleri ve kontrol çalışmaları yapılmaktadır. Tello İHA üzerinde yol planlama, görüntü işleme vb. çalışmalar yapılmaktadır. Kendi yaptığımız dronlar üzerinde otonom uçuş çalışmaları, sürü çalışmaları vb. yapılmaktadır.
Sorumlu Akademik Personel
• Arş. Gör. Asaf SAYIL, asayil@sivas.edu.tr
• Arş. Gör. Muhammet EVREN, m.evren@sivas.edu.tr
• Arş. Gör. Volkan PAKSOY, volkan.paksoy@sivas.edu.tr
• Arş. Gör. Kübra ÇİFTÇİ, kubraciftci@sivas.edu.tr

Cihazın Kullanım Amacı: Crazyflie iç ortamda çalışmaya uygun, ROS ile entegre algoritma geliştirilebilen geliştirme kitleridir.
Laboratuvarımızda sürü sistem çalışmalarında kullanılmaktadır. Sürü sistemleri, tek bir sistemin yerine getiremeyeceği, getirse de üzerinde çok fazla ve pahalı sensörler bulundurması gereken; doğadaki sürülerden (kuş sürüsü, balık sürüsü vb.) esinlenilerek oluşturulmuş robotik sistemlerdir. Bu sistemlere İHA, robot, IKA, uzay aracı uydu vb. örnek olarak verilebilmektedir.
Videoyu izlemek için lütfen tıklayın.

Cihazın Kullanım Amacı:Tello İHA dahili bir kameraya sahiptir ve harici bir konumlandırma sistemine ihtiyaç duymamaktadır. Kamerası sayesinde görüntü işleme ile amaçlanan konuların testleri üzerinde denenebilmektedir.
Laboratuvarımızda Tello İHA ile uçuş alanındaki bir kişinin yüzünün tespit edilebilir ve istenilen mesafede onu takip edebilmektedir. İHA üzerinden alınan görüntü bilgisayara aktarılarak orada görüntü işleme ile elde edilen bilgiler kontrol döngüsüne beslenerek takip görevi yerine getirilmektedir.
Videoyu izlemek için lütfen tıklayın.
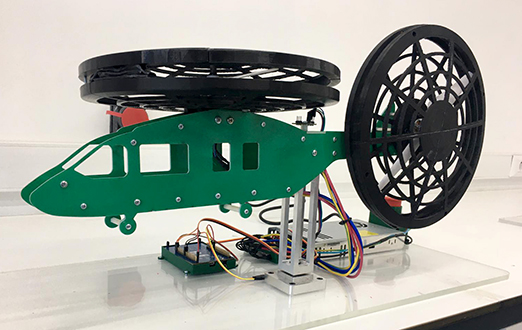
Cihazın Kullanım Amacı:2 DOF (Degree of Freedom) helikopter deney düzeneği, kontrol mühendisliği veya havacılık mühendisliği alanlarında kullanılan bir laboratuvar aracıdır. Bu düzeneklerin amacı, helikopterlerin dinamik davranışlarını incelemek, kontrol algoritmalarını geliştirmek ve uygulamak, stabilite analizleri yapmak ve pilotaj sistemlerini test etmektir.
Deney düzeneğindeki 2 DOF, iki serbestlik derecesini ifade eder. Bu genellikle helikopterin yatay düzlemde (pitch) ve dikey düzlemde (altitude) hareketini simüle etmek anlamına gelir. Bu düzenek, helikopter dinamiklerini anlamak ve kontrol etmek için gerekli temel unsurları içerir.
Videoyu izlemek için lütfen tıklayın.
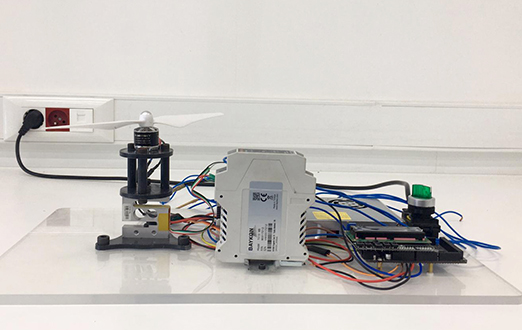
Cihazın Kullanım Amacı:Motor itki kontrol istasyonu deney düzeneği, havacılık ve uzay mühendisliği alanlarında kullanılan bir laboratuvar aracıdır. Bu tür bir deney düzeneğinin temel amacı, bir motorun itki (thrust) kontrol sistemini test etmek, analiz etmek ve optimize etmektir. Bu deney düzeneği, genellikle jet motorları, roket motorları veya diğer itki üreten sistemlerin kontrol sistemlerini simüle etmek için kullanılır.
Videoyu izlemek için lütfen tıklayın.
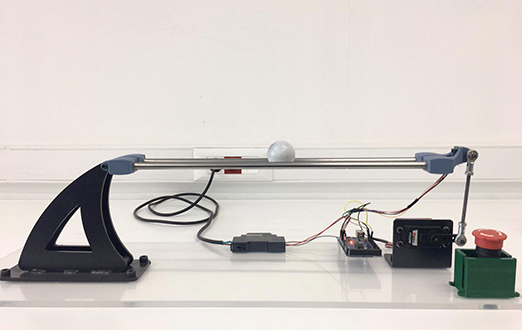
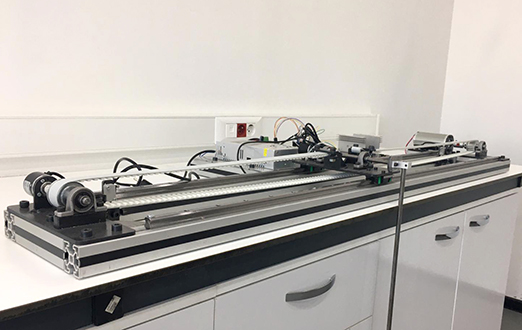
Cihazın Kullanım Amacı:Top ve kiriş deney düzeneği, kontrol ve sistem dinamikleri konularında eğitim ve araştırmalar için kullanılan bir laboratuvar aracıdır. Bu deney düzeneğinin temel amacı, bir topun bir kiriş üzerindeki hareketini kontrol etmek ve bu süreçte çeşitli kontrol stratejilerini incelemektir.
Videoyu izlemek için lütfen tıklayın.
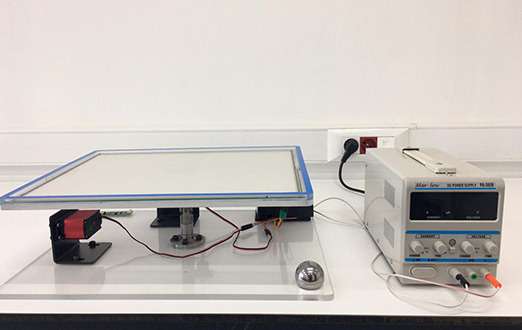
Cihazın Kullanım Amacı:Top ve plaka deney düzeneği, kontrol ve sistem dinamikleri konularında eğitim ve araştırmalar için kullanılan bir laboratuvar aracıdır. Bu düzenekte, bir topun bir düzlem üzerindeki hareketini kontrol etmek ve çeşitli kontrol stratejilerini incelemek mümkündür.
Videoyu izlemek için lütfen tıklayın.
Cihazın Kullanım Amacı:Ters sarkaç deney düzeneği, kontrol ve sistem dinamikleri alanlarında kullanılan bir laboratuvar aracıdır. Ters sarkaç, bir çekmenin üstünde bir küçük kütleden oluşan bir sistemdir. Bu düzen deneyeği, özellikle denge kontrolü ve stabilizasyon yöntemlerinin incelenmesi için kullanılır.
Videoyu izlemek için lütfen tıklayın.

Cihazın Kullanım Amacı: İHA’ların kapalı ortamda güvenle uçmalarını sağlamak, kendilerine ve çevrelerine verebilecekleri zararı minimize edebilmek için 3metreye 5 metre bir kafes kurulmuştur. Bu kafesin 3 köşesinde İHA’larla haberleşen ve konum bilgilerini hesaplayan lighthouse (ışık evi) sensörler bulunmaktadır.
Lighthouse konumlandırma sistemi, Valve Inc. şirketinin SteamVR Baz istasyonlarını ve Crazyflie üzerindeki Lighthouse güvertesini kullanmaktadır. Bu sensörler sayesinde Crazyflie mini İHA'lar kendi X, Y ve Z eksenlerindeki konumlarını hesaplayabilmektedir.
Videoyu izlemek için lütfen tıklayın.
Laboratuvarımızda yapılan bazı çalışmaların örneklerine aşağıda bulunan linkler yardımıyla ulaşabilirsiniz.
Lütfi Abay yapay zeka ve robotik laboratuvarı çalışmaları için lütfen tıklayın.
Lütfi Abay yapay zeka ve robotik laboratuvarı çalışmaları için lütfen tıklayın.
Lütfi Abay yapay zeka ve robotik laboratuvarı çalışmaları için lütfen tıklayın.